













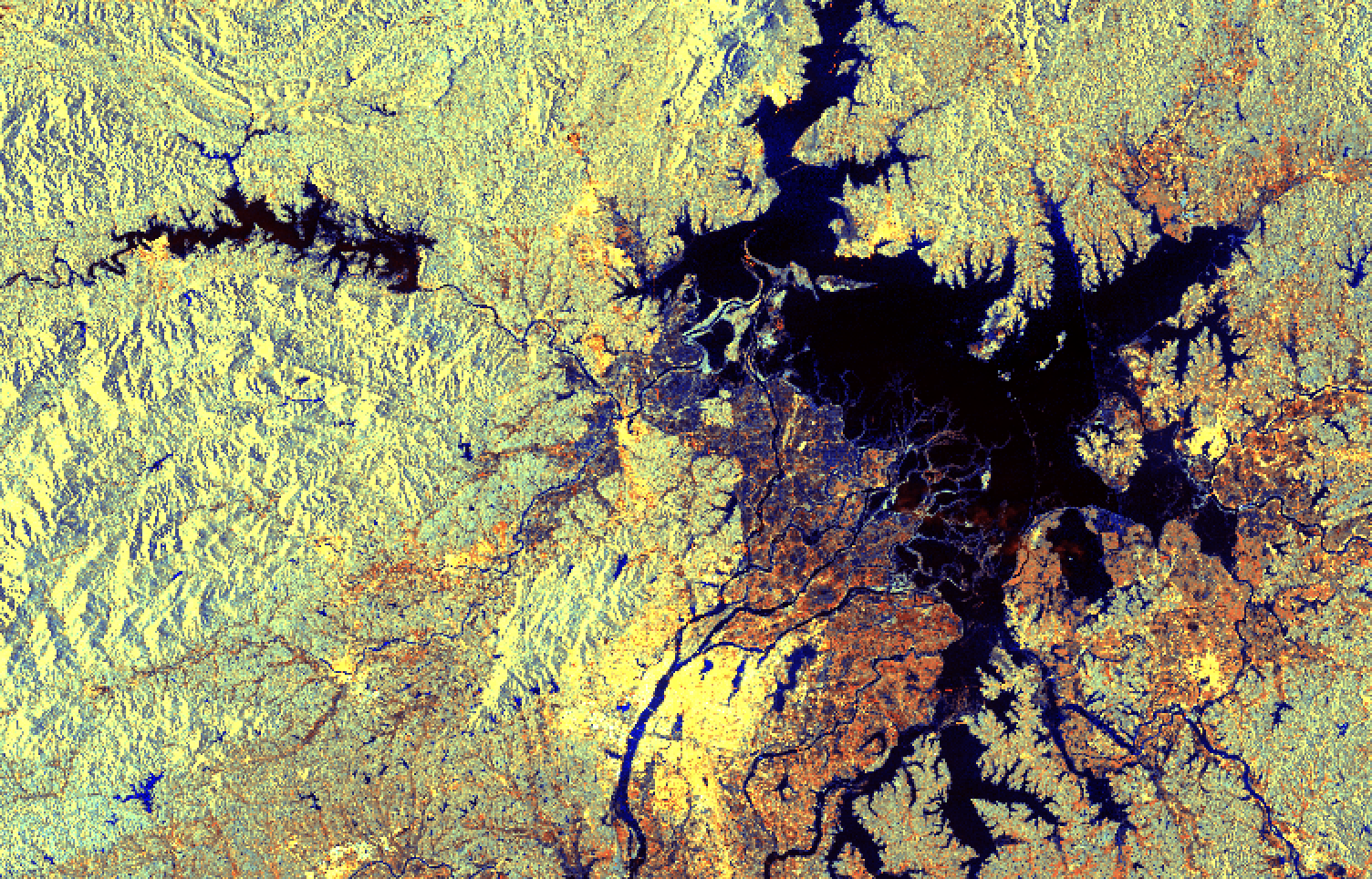
概述由于其不易受天气影响的特性,极化SAR在越来越多的对地观测场景下发挥着重大的作用,尤其是洪涝灾害的变化检测。洪涝灾害期间,常伴随着大雨或阴天,传统的光学影像难以发挥作用,此时仅能依靠SAR影像实现变化检测。与服从简单正态分布的光学影像不同,SAR影像的概率分布比较复杂,原因是其涉及到各类平方及乘除法运算。已有的SAR变化检测方法,无论是多极化还是单极化,除先分类后检测的分类方法外,基本都依赖极化SAR影像的概率分布构建距离测度。距离测度最早应用于SAR影像的分类中,后许多学者对其加以改良,将此类方法应用于变化检测。这是很自然的,因为变化检测实质上就是一种最简单的二分类问题。通过理解变化检测中距离测度的构建,可以更容易理解分类场景下距离测度的构建。本着有难到易,“先学走,后学跑”的原则,本文将介绍单极化SAR影像距离测度的构建,选取了同一区域不同时相的两景Sentinel-1影像作为例子进行演示。下文的第一部分,将介绍一些需要了解的预备知识;第二部分将介绍如何构建一种适用于单极化强度影像的极化距离测度;第三部分将使用构建的测度进行一次变化检测的尝试,定性地验证其效果。
预备知识下面介 ...

背景与概述在遥感影像的应用领域,图像分割是必不可少的步骤之一。传统的图像分割算法基于人工阈值,受主观影响大,造成效率低下;自动阈值法如OTSU,虽然解决了人工阈值确定法的缺点,但仍要求图像直方图近似双峰分布,对类别分布不均,感兴趣类别占比小的遥感影像分割效果不佳。马尔可夫随机场(MRF)是一种基于贝叶斯理论的图像分割方法,该方法充分考虑了图像的邻域信息,且无需人工干预,具有效率高,精度好的优点。
马尔可夫随机场原理要理解马尔可夫随机场模型进行图像分割的原理,首先要认识到“马尔可夫性(Markov property)”。马尔可夫性是指“当一个随机过程在给定现在状态及所有过去状态情况下,其未来状态的条件概率分布仅依赖于当前状态”。用常见的天气作为例子:若某地明天的天气仅与今天的天气有关,而与昨天,前天都不相关,则认为该地天气具有“马尔可夫性”。具体到图像分割,可以假设图像的某一像素所属类别只与其周围邻域的其他像素有关,而与邻域外的像素无关,即图像具有“马尔可夫性”。事实上包括遥感影像在内的大部分图像确实具有类似的特征,因此适合使用MRF模型进行图像分割。假设待分割图像为S,分割结果为W,图 ...

问题描述在使用MacOS版本的Gamit软件的track模块时,会出现类似错误:
12dyld[xxxx]: dyld cache '(null)' not loaded: syscall to map cache into shared region faileddyld[xxxx]: Library not loaded: /usr/lib/libSystem.B.dylib
导致track模块无法正常运行。官方文档仅说明是由于Apple Silicon内存限制所造成的,并未给出具体原因及解决方法。
原因探究通过查询Apple的帮助文档,结合一位Apple DTS工程师的说法,这背后其实有着悠久的历史(?
早在 Mac OS X 发布之初,Apple还不支持 SDK。当安装开发者工具时,它会在当前系统的绝对位置放置头文件,例如, 头文件将放置在 /usr/include/pcap/pcap.h,工具会在这些绝对位置查找头文件。同样的情况也会发生在库中,只不过链接器会在 /usr/lib 中查找。到目前为 ...

软件介绍GAMIT/GLOBK是由麻省理工学院、哈佛-史密森天体物理中心(CfA)、斯克里普斯海洋研究所(SIO)和澳大利亚国立大学开发的一个综合GNSS分析包,用于估计台站坐标和速度、地震后变形的随机或函数表示、大气延迟、卫星轨道和地球定向参数。
作为一款开源软件,GAMIT/GLOBK提供了多种系统的支持,包括常见Linux发行版和MacOS等。而对于Windows,则需要使用Linux子系统或虚拟机。
由于软件开发年代较为久远,历史包袱较重,在最新的MacOS Sonoma上安装未免存在诸多问题。本文将结合安装步骤及常见报错,介绍GAMIT/GLOBK软件的基础安装方法。
安装信息
软件版本:GAMIT/GLOBK 10.71
操作系统:MacOS Sonoma
gcc版本:Apple clang version 15.0.0 (clang-1500.1.0.2.5)
gefortran版本:GNU Fortran (Homebrew GCC 13.2.0) 13.2.0
安装过程及问题解决开始之前,首先应获取GAMIT/GLOBK软件源 ...

前言前不久入手了一卷36张装的柯达全能400,花掉了78大洋。这是第一次买正儿八经的C41彩负,之前彩负的价格高的离谱(虽然现在也离谱),所以只用过柯达的分装电影卷和黑白卷。今天上午胶卷冲洗完成了,所以决定写个流水账,记录一下上手体验。
样片先放几张样片,扫描仪用的SP3000:相比之前拍的电影卷,全能400的色彩还是相当顶的。特别是第一张样片的蓝色,真的超级好看,感觉纯净又柔和。考虑到是400度的卷,噪点控制也算完美,就算有杂色PS简单一拉就回来了。
体验和踩坑拍摄使用的相机是宾得的Z20胶片单反,相机没得说,自动上卷、自动回卷、自动对焦,虽然镜头素质不尽完美但是也不能对这个20多年前的机器抱有太大的期望。由于老相机测光普遍不好用,因此使用手机App当作测光表。测光软件是Lightme,免费版也相当好用的良心软件。
为了拍好这卷不菲的胶卷,专门学了区域曝光法,用软件的点测光可以轻松实现,操作很简单——打开点测光模式,把中心的准星(?放到拍摄区域内接近中灰的位置,点一下测量;再移动手机,先把摄像头指向场景中需要看清的最暗位置,确保软件显示的曝光值不小于-2ev或-3ev,然后移动到需要 ...

生活日常
未读2024-03-09又想起来这个页面了。
这是第四个版本的Astrophel。一转眼,三年过去了,时间如同流水,而我也已经忘记了抑或是改变了很多。这三年里,Astrophel的服务还算稳定,但是我越来约感觉到Wordpress框架的臃肿。所以,Astrophel Next计划,启动(bushi
接下来的一年时间,我会在空闲时逐渐将旧版Blog迁移至Hexo框架,希望这可以为你带来更好的阅读体验。
2021-09-29从Astrophel的第一个版本开始,我会在Hello World这个页面写一个简短的前言。不知不觉,这已经是Astrophel的第三个版本了。这其中,经历了两次重大的服务器故障。这一次,我将服务器迁移到了北京,并申请了一个ICP备案号。这样,既能提升网站的访问速度,又能提高安全性。毕竟,我实在没有精力每天维护这个网站。希望它能自己平安运行吧。
另外,在网站升级和服务器故障的这段时间里,大部分内容都遗憾地丢失了。不过借助Google快照,我会尽力恢复一部分文章。对于不能恢复的部分,比如说记录我与她故事的那篇加密文本,我会凭记忆重写一份。
2021-07-01Astrophe ...


最近在编写一个简单的遥感影像处理程序,技术路线是使用Matlab实现一个较为耗时和复杂的数据处理后端,使用VS C#(.NET Framework)实现一个简单的前端GUI界面。
由于这方面网上的资料比较多,本来没打算写(水)一篇博客的,但是实现过程中遇到了不少坑和疑问,所以还是统一记录一下。
Matlab后端运算打包dll由于遥感影像处理多涉及矩阵运算,因此使用Matlab进行编程。将所有代码写成函数后,在“附加资源管理器”中下载并安装MATLAB Compiler和MATLAB Compiler SDK两个附加包。
在App选项卡打开Library Compiler功能,在TYPE栏选择.NET Asswmbly,在EXPORTED FUNCTIONS栏添加自己想要编译的函数。如果想要打包结果不包含Matlab运行时(MCR)以节省空间,则在PACKAGING OPTIONS中选择第一个选项,在未安装Matlab本体的计算机上运行时,选择该选项需要用户手动下载并安装免费的MCR或购买Matlab本体;否则,选择第二个选项,打包包含MCR的完整包,会占据较大空间。另外,如果被打包的 ...

SGO南方地理数据处理平台是由南方测绘公司开发的数据处理软件,常用于GNSS数据的解算,该软件可以在南方下载官网下载,但只有Windows版本。由于实验需要使用该软件,因此考虑如何在Mac上更加优雅的安装本软件。
Wine(Wine Is Not an Emulator)是一款能够在多种 POSIX-compliant 操作系统(诸如 Linux,macOS 及 BSD 等)上运行 Windows 应用的兼容层。Wine 不是像虚拟机或者模拟器一样模仿内部的 Windows 逻辑,而是将 Windows API 调用翻译成为动态的 POSIX 调用,免除了性能和其他一些行为的内存占用,让你能够干净地集合 Windows 应用到你的桌面。[1]CrossOver是Wine的商用项目,可以更加简单快捷的在Mac和Linux上安装和管理Wine。
CrossOver的开发公司是codeweavers,这是一家在开源软件上做出卓越贡献的厂商,我非常尊敬他们,希望大家有条件可以去国际版网站上购买正版的CrossOver或使用14天试用版(^_^)商城链接,一定要使用英语或繁体中文访问,简体中文 ...

为了完成人工智能课的大作业,写了这个程序,代码比较简陋(
使用工具本项目使用Anaconda搭建虚拟环境,所用python版本为3.10。机器学习框架选择PyTorch cuda 11.7版,训练显卡为NVIDIA RTX 2060,显存为6G。展示环节使用了第三方库gradio。
效果展示
详细内容及代码项目地址:https://github.com/Astrophel02/ShipDetect
使用了https://opensar.sjtu.edu.cn 的opensarship-1 数据集,对数据集进行预处理使之大小适合网络。
处理后的数据集在这里:OneDrive
模型选用简单的AlexNet,最终识别准确率可以达到97%以上。
代码中,CNN_1是训练过程,CNN_2是展示过程,针对实验用数据集的预训练模型在这里:OneDrive,该模型可以直接在CNN_2.py中加载。全部代码如下:
CNN_1:
12345678910111213141516171819202122232425262728293031323334353637383940414243444546474849 ...
